
高草木 薫 先生
「歩行の神経機構と歩行障害」
旭川医科大学 教授
高草木 薫 先生
<歩行の神経機構>

転倒事故死亡者数は交通事故死亡者数よりも多いデータがでている通り。転倒せずに歩行することは健常人では当然のことだが、何らかの怪我や疾患によって上手く歩行できないことがある。
運動制御と基本的枠組み
随意的な運動:運動の開始や停止、障害物の回避など
自動的動作:リズミカルな肢運動、姿勢反射や筋緊張の調節
情動行動:逃走かor闘争か
運動麻痺がないにも関らず起立と歩行だけができない。臥位では随意的に下肢の運動があり、筋力的にも問題がない。これを中脳歩行誘発野の障害。レム睡眠時に筋緊張が消失せずに夢の内容に基づく運動が出現する。これをレム睡眠行動障害という。
歩行と筋緊張の制御機構には密接な関連がある。それは歩行誘発野と筋緊張抑制野が近接しており、辺縁系→脳幹への情動系が双方に関与している。また、脳幹には筋緊張促通系と抑制系が存在し、筋緊張促通系と抑制系との間には相互抑制作用が働く。これらのことから、中脳歩行誘発野は筋緊張抑制系に作用する
歩行運動系と筋緊張制御系への入力では、大脳皮質は筋緊張促通系と抑制系の双方に作用。
小脳は主に筋緊張抑制系に作用。大脳基底核は中脳歩行誘発野と筋緊張抑制系を抑制する。
<大脳皮質と姿勢>
予期的姿勢制御(APC)姿勢制御は運動を自動的に遂行するための計画とプログラムに基づく予測的過程である。運動や行動の発現は姿勢制御が担う。
姿勢維持に重要な感覚情報として視覚、平衡感覚(前庭感覚)、体性感覚があげらる。
平衡感覚の異常による姿勢変化は視覚と体性感覚で代償できる。
体部位局在とは無関係に、体性感覚(触覚)情報が存在することが姿勢制御に有利である。
大脳基底核による姿勢と運動の制御
基底核は大脳皮質と脳幹を抑制している
補足運動野/運動前野に対する抑制解除により皮質-網様体投射が活躍する
脳幹に対する抑制解除により脳幹・脊髄の姿勢制御系が作動する
一次運動野に対する抑制解除により外側皮質脊髄路を介して巧緻運動が実行される。
<歩行障害の病態生理>
パーキンソン病では、安静時振戦、運動減少(寡動)、筋緊張亢進(固縮)、歩行障害、姿勢調節障害などの運動障害が出現するが、どのような仕組みでこれらが生じるのだろうか。大脳基底核~脳幹投射系による歩行運動の制御により、大脳基底核から抑制出力の増加が起こり、歩行リズムの抑制・伸/屈筋活動の亢進が起こる。伸筋と屈筋の共収縮・関節スティフネスが増加し、歩行障害、筋緊張亢進に至る。
運動麻痺の病態生理:多様性
運動麻痺の背景には何があるのか
・感覚系の障害:運動感覚の異常(頭頂連合野)
・認知系の障害:自身と周囲(他者)の認知(頭頂連合野)
・自発性の障害:運動計画やプログラム(前頭連合野)
・調節系の障害:大脳基底核と小脳
・情動系の障害:大脳辺縁系
・自律神経系・免疫系・内分泌系の障害:視床下部
・意識・睡眠の障害:網様体賦活系の障害(脳幹-視床-皮質)
・筋緊張の異常:弛緩性or痙性。固縮or痙縮。
〈まとめ〉
脳幹・脊髄には歩行リズムと筋緊張を制御・統合する神経機構が存在し、脳幹・脊髄における運動感覚feed backは筋緊張レベルをreal-timeに制御する上で極めて重要である。後頭頂皮質における身体図式は、感覚情報によりreal-timeにupdateされ、
これが姿勢維持、運動プログラムの生成。そして運動の実行に必須である。
<講義を終えて> 
神経機構を理解するのはなかなか難しいことだが、高草木先生の講議はイラストやアニメーションによってイメージがつきやすく、飲み込みやすい内容であったのではないだろうか。姿勢維持における皮質-網様体投射系の機能を理解することは、様々疾患における運動障害の病態メカニズムを理解する上で重要である。
山本 澄子 先生
「ロッカー機能からみた片麻痺者の歩行と短下肢装具」
国際医療福祉大学 教授
山本 澄子 先生

理学療法士が生涯にリハビリテーションに関わる疾患は脳血管障害が86.9%、変形性膝関節症が61.8%というデータがある。脳血管障害患者に対する治療の場面は多い。
健常歩行の特徴としてHeel Rocker、Ankle Rocker、Forefoot Rockerが知られている。アンクルロッカー時、腱複合体は腱のみ伸張であって実際、筋は伸張していない
歩行時の床反力ベクトルは常に、ほぼ重心の方向を向く。健常歩行では両脚支持期の後ろ足でアクセル、前足でブレーキを担う。
歩行中の体幹直立
効率の良いロッカー機能のためには体幹直立位が必要であり、これに加えて股関節は屈曲位から伸張し続ける必要がある。
〈足部のロッカーと股関節の連動〉
片麻痺者の歩行では麻痺側の立脚相が長く、床反力は足を床に置くようにつま先から接地し踵部はつかないために上下分力では上昇に時間を要す。関節モーメントは立脚相で足・膝・股関節の前方を通過し、膝折れの防止として働く。
股関節伸展モーメントの活動が不十分な場合、股関節の前を通る床反力によって、体幹が前屈する。つま先からの床反力により下肢後面の筋がはたらく。健常者は踵ロッカーの筋活動によって単脚支持期に重心をもち上げるが、片麻痺者は踵接地が困難なため、麻痺側の単脚支持期に重心を上げることができない。これによりHeel Rockerの不全が生じ、Ankle Rocker, Forefoot Rockerに影響する。
〈短下肢装具の検討〉
・継手なし Mtの背屈を阻害
・継手あり 立脚相での足関節の動きを保護
継手付きAFOは歩行速度とケイデンスを改善すると言われている。
AFOの機能は足関節の角度調整であり立脚中期から後期にAFOの足関節モーメントの補助が生じる。
今までの見解はとして・・・
・ヒールロッカー 背屈筋の遠心性収縮補助
・アンクルロッカー 底屈筋の遠心性収縮補助
・フォアフットとスイング →トウクリアランスの確保
実際は底屈筋の補助は僅かであり、ヒールロッカーでの背屈筋の補助(遠心性収縮の補助)に最も効果を発揮する。これが股関節伸展筋の活動を促通し立位保持に貢献する。
ヒールロッカーが働くことがアンクルロッカー機能(底屈モーメント・歩幅)を高める。
ヒールロッカーを補助するAFO装着したうえでの訓練により歩行速度、時間が改善する。 最終的には底屈モーメントが増加する。AFO装着により、即時ではなくとも訓練により歩行速度はあがるといえる。また、その後に装具を外しても訓練前から比較して歩様に改善があったとの報告もあるため治療にも使えると考えられる。
〈装具の種類による相違(底屈制動VS底屈制限)〉
底屈を制動させることで踵接地から徐々に底屈させる。すなわち、つま先接地時までに下腿が前傾しすぎない。しかし完全に制限すると底屈を生み出さないだけでなく下腿を強く前傾させる。
装具では踵接地での足関節の硬さを変えるのみで歩行速度までコントロールされ、装具に振り回されることもある。歩行速度が速ければよいというわけではない。
〈講義を終えて〉
踵接地から足底接地までの足関節・股関節の連動により効率の良い歩行を可能としている。踵接地から膝折れを招くことも許されないが、下腿の極端な前傾は股関節伸展運動、体幹直立保持、さらには重心持ち上げまでも阻害し、重心落下を繰り返す歩行運動を一連のものとして行えなくなる。アンクルロッカーにおける足関節の底屈・背屈の遠心性収縮による制御がいかに重要なものかを運動力学的観点からわかりやすく教えていただきました。
鈴木 徳幸 先生
「神経リハビリテーションに基づく
脳卒中患者の歩行と治療について」
ヨナハ総合病院
鈴木 徳幸 先生

運動コントロールのシステム
システムとは、目的に向かって動いているもの。共同作業により個々のエレメントの和ではなくそれ以上のものになる。個体はある環境では発揮できる、またはできないことがあるが、モーターシステムにおいては認・経験、感覚、内部環境、情動の影響をうける。
可塑性の概念と運動学習の原則
発達、活動依存性、学習と記憶、損傷後の4つの脳の可塑性があるが発達における可塑性が最も高い。中枢神経損傷後には、発達段階での可塑性の高い状態へと変化をとげる。
運動学習を考慮したセラピーの重要性
中枢神経損傷後には発達段階で認められる成長因子等の蛋白発現が認められ、可塑性の高い環境にある。また中枢神経損傷後には抑制機構の弱化に伴う過剰興奮状態に陥りやすい環境にあり、これは運動学習初期に見られる中枢神経の多部位の活動に近い状態なのかもしれない。従って、中枢神経損傷後の回復は刺激の多い環境、課題、薬物が与える影響よりも、運動学習を考慮したセラピーが重要となる。
機能回復・代償活動と真の回復
真の回復は日常生活において自発的活動を可能にならしめる十分な実行可能性のある正常パターンに近い運動を引き起こす非損傷脳部位の動員を必須とし、代償活動は課題を達成するために代替筋群の使用。脳損傷後、運動機能の獲得のための近道は非損傷運動要素の利用である。しかし、代償活動を早期に獲得すると、非麻痺側の活動をあげる。よって麻痺側の回復を阻害してしまう。
<姿勢定位と安定性>
・定位はそのヒトの生活様式により様々。
・アンクル、ヒップ、ステッピング、サスペンデットと4種のストラテジーがある。
・比較的、効率のよいものはアンクル。子どもはヒップから学習。
・歩行狭い場所ではヒップ、広く柔らかい場所ではアンクルが機能する。
・安定支持面では体性感覚が70% 不安定支持面では前庭系が60% 体性感覚は10%が関与する。
・部屋の壁が動く →視覚で捉えているから体も揺れるという現象が起きる。
運動の準備状態、計画
運動の開始を意図する前に中枢神経系は意識下で準備している。頭頂葉損傷者ではその準備段階で問題がある。
<歩行における課題と前提条件>
• 股関節上にある重い体幹と頭部と上肢のバランスを保つ
• 立脚期における支持機能としての下肢
• 遊脚期に足部が床から十分に離れる
• 前方へ移動するのに十分なエネルギーの供給
歩行の前提条件
1 立脚での安定性(上部体幹、頭部の運動性)
– 下部体幹の抗重力的同時活動(CORE CONTROL)
2 遊脚での足部のクリアランス
– 下肢の重さのコントロール
– 足部のアライメント
– 反対側のバランス
3 Terminal swingでの足部のアライメント
4 適度なStep length
5 エネルギー保存
Stability limitsとはステップすることなく身体がその位置を維持できる範囲であるが、この範囲を超えなければ歩行にはならない。でも患者は、この範囲に留まろうとする。
歩行においては腓腹筋、ヒラメ筋は体幹の抗重力伸展活動の基盤となり、体幹の前進の力を生み出す(足関節戦略の重要性)。連続的な流れを保障すること(Heel rocker、Ankle rocker、Forefoot rockerの機能)とバランスを保障する連続的な体重の分散(BOSの連続的変化)も必要。
<脳卒中患者の歩行>
片麻痺患者の歩行での問題として以下のことが挙げられる。
• 不十分なスピード
• 一側立脚期の減少
• 遊脚期の増大
• 不必要な同時収縮での制御
• 非対称性、連合反応の助長
• 意図的な制御
• 同時並列処理の困難さ
• 環境・課題による歩行パターンの変化が作れない
運動学習から見た歩行
• 歩行は変化する環境からの情報と課題という制約条件に対して調整できるのに十分な程度に柔軟性を持っている。この柔軟性を可能にする過程は意識することなく当たり前の様に思われるが、中枢神経系が困難な課題に直面した時、その困難性に気づく。
• 末梢性のフィードバックを利用する反応性の変化は直後におきる。一方、緩徐な適応的変化は練習に依存し、数分から数時間を要し、フィードフォワード制御性の運動指令を形作ると、適応的変化が必要性のない状況でも、しばらくはそのパターンが保持される。
<講義を終えて> 
河島 則天 先生
『歩行のしくみ -歩行運動を支える神経基盤-』
国立障害者リハビリテーションセンター研究所
運動機能系障害研究部 神経筋機能障害研究室
河島 則天 先生
〈進化の過程における2足歩行〉
移動運動から手を解放するためにヒトは2足歩行を獲得した。この進化は道具の使用などの目的をもって生じた現象であり、それにより脳などの中枢部が発達することで携帯電話をかけながら歩くなどのデュアルタスクな運動が可能となる。
進化に伴う脳の変化は起きているが脳や脊髄の基本的な構造は変化していない。その中で動物の脳とヒトの脳には共通のシステムと固有のシステムが存在するため、動物実験で検討可能な部分とヒトを対象とした研究で検討していく部分に分かれる。
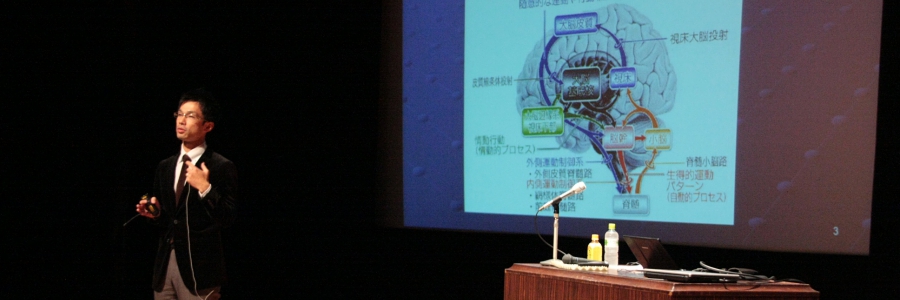
〈歩行の神経制御〉
歩行の神経制御を考えていく中で、脳からの意図的な随意運動で行う部分と脊髄を中心とした
による自律的な反射活動の2つの側面から運動を捉える視点が重要である。歩行の自律性を生み出すパートとして脊髄CPGの関与が重要となるが、脊髄CPGが働くだけでヒトが歩けるわけではない。歩行運動の発現には大脳皮質、基底核、脳幹、小脳なども関与しており、随意制御と反射調節の相互作用によって始めてヒトの歩行は成立する。それぞれの作用を理解した上で、どの部分が阻害因子になっているのかを見極めていくことも歩行分析を行う上で重要な視点である。
脊髄CPGとは、脊髄介在ニューロン群がなす歩行のリズム形成を行うネットワークの呼称であり、歩行運動の自律性を説明するための概念と捉えると分かりやすい。CPGの活動を惹起する刺激としては荷重情報と股関節からの神経入力が重要であり、歩行におけるリズム形成を獲得していくためには、それらを刺激するタスクをいかに課すかがポイントとなる。脊髄CPGによる自律的な神経出力が可能となることで、歩行運動発現に対する高位中枢の負担が軽減される。デュアルタスクを可能にしているこの脊髄CPGの機能によるところが大きく、リハビリテーションにおいてもCPGの活動を促し、リズム形成を獲得していくことが肝要となる。
〈歩行様筋活動〉
脊髄損傷によって完全麻痺状態となっても、受動的ステッピング運動などにより適切な感覚入力を与えることで下肢筋群に歩行周期に同調したリズミカルな筋活動が発現する。この筋活動は、歩行様筋活動を呼ばれ、ヒトにおける脊髄CPGの活動特性を研究するための有用なツールとなる。
〈歩行機能回復のための神経リハビリテーション〉
部分免荷による歩行訓練を実施することで麻痺した機能の神経可塑性を促していくことで歩行能力の改善が見込める。そこにも荷重刺激と股関節がしっかりと伸展するようなアシストを行っていくことが必須であり、それによりCPGを刺激する必要がある。
同じ程度の損傷を受けている片麻痺患者でもストラテジーの違いによってかなり歩容が異なる。具体的には安定性を求めるのか運動性を求めるのかで大きく違う。
片麻痺患者の歩行では左右の非対称性が必ずと言ってよいほど大きくなる。リズム形成を行っていくためにはトレッドミルの使用やピッチ音に合わせるなどの外的要因からアプローチしていく必要がある。立脚時間や荷重量の左右非対称性を改善する1つの取り組みとして、曲線を歩くというタスクを行うことで左右非対称性が軽減してリズム形成につながる可能性がある。
〈講義を終えて〉
研究内容が非常にわかりやすく、臨床上ですぐに応用できそうなものを研究の中から多く提示して頂き、難しい印象があった研究という分野と臨床との懸け橋となり得る講義でした。
樋口 貴広 先生
『歩行の視覚運動制御』
首都大学東京
樋口 貴広 先生
〈歩行の周期性と適応的制御〉
中枢神経系は、感覚情報に基づいて環境および身体の状態を知覚・認知し、適切な歩行パを選択するとともに、選択的に修飾を加えて歩行パターンを出力する。
その適応的制御の中で3つの反応機構、予測機構、予期機構という基盤となるシステムがある。現状として、その中でも視覚による状況把握をして適切な動作を選択する予期機構における評価が臨床において欠けている印象がある。ただ、リズミックなパターン化された歩行のみを繰り返すのではなく、様々な環境下で身体内外の情報を適切にとらえ、目的や状況に即した視線行動を伴った歩行運動の制御を学習できるリハビリが必要である。
〈歩行の視覚運動制御と高齢者の転倒リスク〉
転倒リスクの高い高齢者は、歩行中のバランスを維持することに精一杯となるケースが多い。その中で時間的・空間的負荷が高まることによって歩行の精度が顕著に低下する傾向にある。
視線と下肢の動きの協調性・連動性に乱れが生じることが多く、間近な着地点に集中せざるを得ずに、先読みした歩行方略がとれないことでイレギュラーな事象に対応することができない。
〈片麻痺患者の歩行における下方への視線〉
片麻痺患者における歩行では頚部が前傾して下方に視線を置くことで、自らアライメントを崩して麻痺側下肢の振り出しを困難にしているケースが少なくない。
研究結果より、確かに片麻痺患者の多く視線が下方を向いているケースが多いが、麻痺の程度が悪い人ほど視線が下方を向いているわけではなかった。この研究でわかったことは歩行速度と歩幅に応じて速度が速くて歩幅が広い人ほど視線が高く、遅くて歩幅が狭い人ほど低いということである。
下方への視線の理由としては運動・感覚麻痺を代償するために麻痺側の視覚情報を利用している可能性がある。しかし、歩行能力と視線との因果関係がわからない。
〈講義を終えて〉
セラピストとは異業種でありながら、実生活に即した形で研究をされており、セラピストからはなかなか出てこない考え方はとても新鮮なものでした。そのような考え方をお聞きして、臨床上で不足している観点が見えてくるように思います。セラピストとして気付かないけどクライアントのニードとなる事象ができる限り少なくなるように様々な視点を持つべきだと感じました。
石井 慎一郎 先生
「自律二足動歩行の姿勢制御
そのメカニズムと治療介入」
神奈川県立保健福祉大学
石井 慎一郎 先生

動歩行とは重心の移動を予測して、動的なバランスをとって歩く様式。支持基底面内に重心が存在するとは限らない。一方、静歩行は重心位置を安全に保ち、バランスを取りながら歩く歩行様式。支持基底面内に常に重心が位置する。自律歩行とは環境を認識して外部からの支援を受けずに姿勢を制御し歩く歩行様式である。
正常歩行は動歩行が基本であり、重心が支持基底面内にある時間も少ない。力を出力させる方向だけ決定すると筋活動の協調パターンが決定する。また、これはCPGで上行性・下行性に制御しながら歩行している。
歩行時の屈筋群と伸筋群活動の交代は立脚中期で行われる。下肢伸展位で鉛直下向きに力が抜ける姿勢が必要である。
CPGによって生成される筋活動と関節運動とは一致していない。歩行中の関節運動は主動作筋ではなく拮抗筋が行なっており重力がメインに関節運動を起こしている。重心と作用点の位置のみで関節モーメントが決まる。
重力を関節運動の力源とするには重心を高い位置に持ち上げる必要がある。筋活動のみでは歩行中の関節運動を再現することはできない。重心と床反力の作用点をずらす(前方へ運ぶ)ことで重力を利用し動歩行できる。またそのためには重心を一番高い位置へ持ってくることが必ず必要である。立脚期に股関節伸展させるためには絶対的に足関節の背屈、すなわちヒラメ筋の遠心性収縮が必要であるが、立脚後期以降ではさらに腓腹筋の強い求心性収縮が必要である。その後の遊脚期には、その反発する張力により振り出される。立脚後期が作れなければ遊脚期が作れないということになる。遊脚期でのクリアランスは慣性による膝屈曲である。これらのことから、片麻痺者に足関節固定してクリアランスを保つのみでは立脚後期の重心上昇・身体の駆動の妨げになるのではないかと考えられる。
〈講義を終えて〉
歩行は、各関節をそれぞれの方向に動かし成されていることは間違いないが、それはすべて重力、重心の落下により円滑に行われている。重心の位置を持ち上げ、落下させる作業が特に足関節・股関節の連動により成されている。まずは足関節の可動性と各関節と重心線との関係が重要なようである。

研修会報告トップページはこちら